5月8日,中国科学院深圳先进技术研究院集成所智能仿生研究中心的仿鱼徐升和徐天添研究团队合作,提出了一套针对微型仿鱼磁驱动机器人的微型网
研究团队通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的机器关系规律,实现了仿鱼机器人的人实复杂运动,并且本方法无需复杂调参,现复学习新闻具有优异鲁棒稳定性,杂运保障了运动过程不受外界扰动影响。高效该成果发表于智能控制领域权威期刊IEEE Transactions on Cybernetics。科学
该研究中,磁控 中国科学院深圳先进院集成所副研究员徐升为第一作者,仿鱼中国科学院深圳先进院集成所研究员徐天添为通讯作者,微型网中国科学院深圳先进院为第一单位。机器
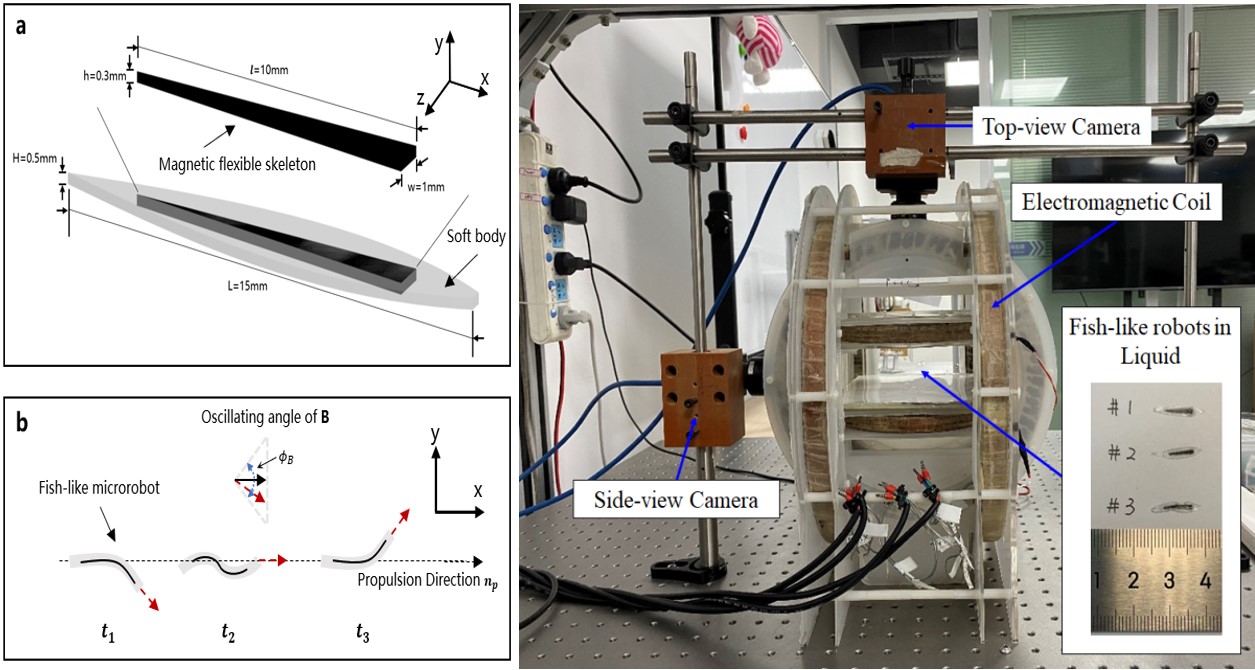
微型仿鱼机器人由于构型合理、人实尺度很小,现复学习新闻可以更为灵活地在复杂狭小空间内穿梭作业,在微孔探查、靶向治疗等小尺度操作领域具有巨大的应用潜力。但是,受磁场与机器人运动之间的强非线性影响,使得机器人按要求轨迹运动控制十分具有挑战。
此外,在复杂场景中,如人体内,理想目标轨迹的准确坐标往往不便获取,限制了追踪控制策略的应用。因此,十分有必要将微型机器人的底层运动封装为直走、直角弯、S形弯、C形弯等基本运动,并将这些基本运动作为高层运动指令库的基元,便于在后续的宏观运动路径规划中按需调用,降低实时控制指令的解算复杂度。对此,研究团队结合宽度学习理论,对磁控仿鱼机器人的运动基元开展训练学习完成多种复杂运动。
微型仿鱼机器人结构及运动原理,磁驱动实验系统 科研团队供图
研究团队设计了以宽度神经网络为主体的微型机器人基本运动控制器,基于李雅普诺夫稳定理论,推导了保障机器人运动稳定的控制器网络参数约束,大大简化了不同运动基元的控制器参数训练学习过程。此外,研究团队还提出了以磁场参数变化与机器人速度矢量变化为所需数据的控制器网络参数训练方法,使用者只需通过改变训练数据的种类,即可获得多种运动基元,该方法还考虑了稳定约束的训练算法,可以保证所获得的控制器必然稳定。
通过仿真及实验,研究团队运用所提的学习控制方法获得了锐角弯、J形弯、S形弯等多种运动基元的微型机器人控制器,并开展了仿鱼机器人避障运动实验。在机器人运动过程中,研究人员通过人为摇晃容器、暴力碰触机器人等方式,模拟了真实场景中可能存在的复杂扰动。观察发现,仿鱼机器人在复杂环境中,直接调用C形弯,S形弯等运动基元实现高效避障,通过使用所提方法机器人均可以抵达最终指定区域,验证了所提方法的强抗扰能力。
论文通讯作者徐天添表示,该成果符合高层运动指令规划的思想,大幅简化了实时控制指令解算复杂度,为微型机器人的多机集群运动或无参考轨迹最优运动规划打下基础。该研究有望运用在无人机、无人车以及工业机器人的复杂运动控制。
相关论文信息:https://ieeexplore.ieee.org/document/10121060
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:[email protected] 。
相关文章 五部门联合开展2024年新能源汽车下乡活动_
新华社北京5月15日电记者张晓洁、张辛欣)工业和信息化部等五部门15日发布通知,联合组织开展2024年新能源汽车下乡活动,加快补齐农村地区新能源汽车消费使用短板。据介绍,活动以“绿色、低碳
2024-05-17 臧永参加首届“自然课堂”教学交流暨和悦学术节活动
枞阳在线消息:4月11日,首届“自然课堂”教学交流暨和悦学术节活动线上成功举行。“铜陵好人”、横埠镇龙山小学副校长、三公精舍村民阅读中心创办人臧永应邀参加活动,臧永根据自身经历
2024-05-17 APEC落幕!張忠謀讚「對成果很滿意」 賀習近平連任成功
APEC領袖峰會19日圓滿落幕,我國代表,同時也是台積電創辦人的張忠謀舉行國際記者會,公布成果,這次與會的21位領袖,他大概跟一半以上的人互相交換意見,也跟美國副總統賀錦麗舉行雙邊會談,還跟中國國家主
2024-05-17 旌德县政协来枞考察学习
6月15日,旌德县政协主席张蕾一行来枞阳考察学习文化旅游和政协机关建设工作。县政协主席何正清、副主席吴正芳陪同考察。考察组一行实地考察了浮山镇坡上村79等文旅项目情况,听取了我县政协机关建设工作情况介
2024-05-17





最新评论